 Germany
Germany Italy
Italy USA
USA South Korea
South Korea UK
UK India
India France
France China
China Japan
JapanRobots
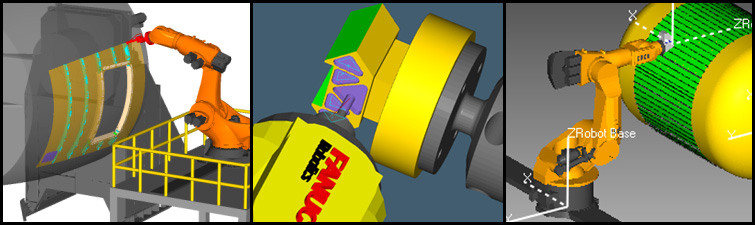
VERICUT simule les robots six poly-articulés des fabricants robots tels que Fanuc, Kuka, ABB, Kawasaki, Motorman et d’autres encore. VERICUT simule également les robots qui ont des axes «externes» supplémentaires. Par exemple, les robots montés sur un axe linéaire (ou une pièce sur un axe rotatif) peuvent considérablement améliorer l’utilité du robot, sa portée, sa rigidité, sa vitesse et sa précision.
En plus de la simulation, VERICUT peut également être utilisé pour adapter les mouvements et post-processer vers les robots. VERICUT calcule les positions à partir des orientations et des positions de l’outil et post-processe ensuite le programme dans le langage spécifique du robot. La plupart des robots sont programmés par apprentissage. La programmation hors-ligne est préférable quand il y a beaucoup d’enchainement de mouvements, que des positions précises à atteindre sont nécessaires, ou que le processus doit être contrôlé ou traçable.
Les tâches typiques pour la programmation hors ligne comprennent:
- Le détourage
- Le perçage et le rivetage
- Le placement de Fibrest
Robot KUKA – Outil de polissage
Fanuc robot – milling
Robot Fanuc – Chargement pièce
Robot KUKA – Perçage et Rivetage VERICUT (VDAF)
KUKA robot – VERICUT Composite Simulation
Kawasaki robot – VERICUT Composite Simulation (VCS)
KUKA robot – VERICUT Composite Simulation (VCS)
Staubi robot CNC simulation with VERICUT
KUKA robot – basic milling
